Шаговый двигатель или сервопривод: отличия, сравнения. Что лучше?
Тезисы:
• Качественные шаговые гибридные сервоприводы не уступают сервоприводам на базе вентильных электродвигателей на низких скоростях вращения.
Шаговые двигатели
Шаговые двигатели - прекрасно известный способ превратить электрическую энергию в точные -механические перемещения. Каждый импульс, посылаемый на драйвер двигателя, двигает ротор в точном соответствии с заданными на драйвере настройками. Например, 100 посланных импульсов на полношаговый привод с двигателем с шагом 1.8° будут преобразованы в поворот ровно на 180°. Одной из сильных сторон шаговых двигателей является то, что они способны работать без обратной связи, без коррекции положения с помощью энкодеров или иных датчиков, т.к. вал по самой архитектуре шагового двигателя совершает перемещения строго в соответствии с поданными импульсами. Однако, это прекрасно работает лишь в том случае, если шаговые двигатели никогда не перегружаются и не впадают в резонанс. В реальности же в очень редких случаях когда отсутствуют эти два фактора. Для того, чтобы быть уверенным, что шаговый мотор не будет пропускать шаги, большинство разработчиков поступают просто - закладывают большой запас при выборе мощности двигателя. Это означает, что на станок будет установлена значительно более тяжелая и дорогая модель, чем это действительно требуется. Резонанс же часто проявляется на тех же самых, рабочих частотах вращения, которые являются основными в конкретном приложении, и поэтому избежать его становится еще сложней.
Как одно из средств избежать последствий кратковременных перегрузок шагового двигателя и пропуска шагов - это установить энкодер на двигатель мотора, точь-в-точь как ставится аналогичный датчик на вал вентильного серводвигателя. Энкодер представляет информацию о положении ротора контроллеру, который сравнивает её с заданной координатой, и использует полученное рассогласование для выполнения шагов таким образом, чтобы скомпенсировать разницу. К сожалению, данный способ не помогает устранить последствия резонанса. Однако, возможность такая все же есть, и заключается она в комбинации коррекции по положению(т.е. компенсации числа импульсов STEP) и одновременного управления ориентацией поля статора шагового двигателя, по принципу аналогичному векторному управлению трехфазными электродвигателями. Поскольку энкодер дает сведения о положении вала, существует возможность ориентировать магнитное поле статора шагового мотора таким образом, чтобы получить максимально эффективное потокозацепление. Причем такая схема не потребует преобразований Кларка, каковые обычно используются для проекции трехфазной системы токов в двухфазную, т.к. шаговые биполярные моторы изначально имеют только 2 обмотки. При таком способе управления ток меняется в обмотках синусоидально - вне зависимости от того, используется полный шаг или микрошаг. Еще одним преимуществом управления ориентацией поля является то, что такой шаговый привод будет нечувствителен к резким изменениям нагрузки - векторное управление позволяет отрегулировать момент привода "на лету" - функция, обычно доступная только при использовании сервоприводов типа PMSM.
Теперь о сервоприводах...
Читатели, возможно, в курсе, что уже достаточно долгое время существуют шаговые сервоприводы, которые используют обратную связь по позиции. Такие приводы просто считают количество шагов и добавляют(или вычитают) шаги для компенсации ошибки, и не способны корректировать угол поворота вала внутри одного шага, "на лету".
В противоположность, синусоидальная коммутация в паре с управлением ориентацией поля действительно способна компенсировать ошибки позиционирования вала внутри одного шага, возникающие из-за неидеальной геометрии деталей шаговых двигателей или нагрузки. Векторное управление магнитным полем гарантирует, что поле статора всегда перпендикулярно полю ротора, и насыщенность поля точно соответствует требуемому моменту. Это увеличивает, эффективность и динамику, и снижает флуктуации крутящего момента. Такой вид управления позволяет шаговым двигателям конкурировать с вентильными сервоприводами на скоростях до 2000 об/мин. На более высоких серводвигатели все же будут эффективней. Оптимальным диапазоном является скорость вращения до 1000 об/мин - в нем шаговые двигатели развивают больший крутящий момент, чем вентильные серводвигатели того же размера.
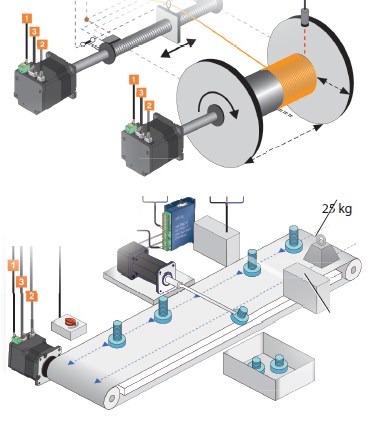
Приложения, в которых шаговые сервоприводы c синусоидальными токами обмоток могут заменить серводвигатели, включают в себя:
- намоточное оборудование,
- транспортные ленты конвейеров,
- управление заслонками насосов
а также многие другие - все те, в каких нагрузка может изменяться скачкообразно. Кроме того, при использовании таких приводов во многих случаях можно обойтись без редуктора, что делает их привлекательными в случаях, когда критичны габариты механизма. И наконец, следует отметить, что сервоприводы с векторным управлением потребляют ровно столько тока, сколько требуется - меньше нагрев, выше КПД привода. Все этим преимущества становятся очевидными, если рассмотреть привод механизма с ременной передачей, которые обычно работают от асинхронного электродвигателя. Хорошим решением будет заменить асинхронный мотор на подходящий по мощности шаговый сервопривод - как правило, таковой будет примерно втрое меньше по габаритам и весу.
Автор: Darxton.ru.