Настройка драйверов Leadshine
Настройка драйверов Leadshine выполняется с помощью ПО ProTuner. Для настройки потребуется компьютер с Windows, оснащенный COM-портом, а также кабель Leadshine RS232-RJ12.

Как известно, драйверы шаговых двигателей компании Leadshine серий AM, EM и DM обладают рядом уникальных функций.
Однако, чтобы воспользоваться преимуществами этих функций в полной мере, драйверы необходимо настроить. Выполняется настройка с помощью специального фирменного ПО - ProTuner. Для настройки потребуется компьютер под управлением Windows, оснащенный COM-портом, а также кабель Leadshine RS232-RJ12.
Подключаем драйвер к COM-порту компьютера с помощью кабеля, устанавливаем ProTuner на компьютер, подаем питание на драйвер.
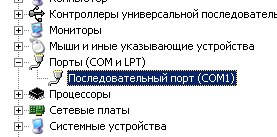
После запуска ProTuner будет предложено выбрать COM-порт для установки связи с драйвером. Номер порта можно посмотреть в диспетчере устройств:
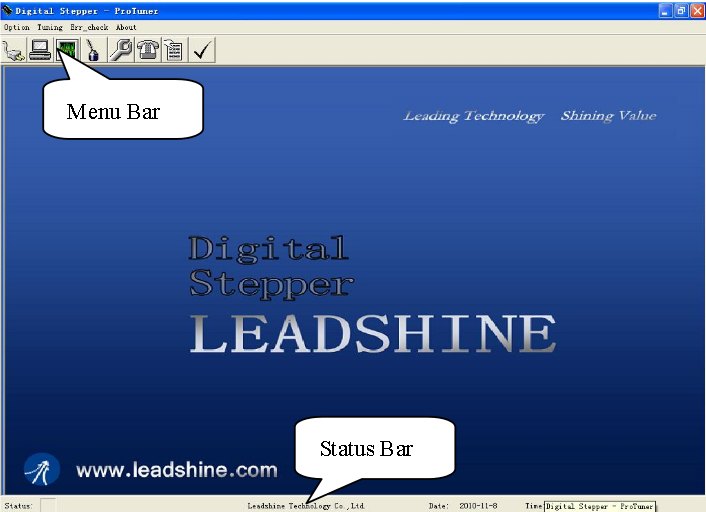
После успешного запуска будет показано основное меню ProTuner:
Настройка контура регулирования обмоток шагового двигателя
Настройка драйвера начинается с пункта меню Tuning, где настраиваются параметры ПИ-регулятора уровня тока в обмотках двигателя. На графике отражается изменение тока во времени, оранжевая линия показывает эталонный уровень тока, зеленый - реальный ток. В идеале график должен быть правильной прямоугольной формы. Значение I-test задает требуемый уровень тока - он должен быть равен рабочему току обмоток двигателей.
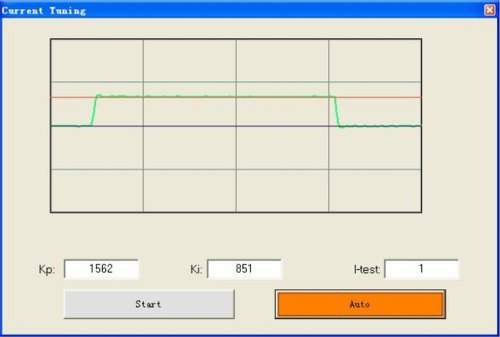
Настройка ПИ-регулятора заключается в подборе двух параметров - пропорционального Kp и интегрального Ki.
Пропорциональный коэффициент Kp соответствует названию - результат его влияния в том, что чем больше разница между нужным уровнем тока и реальным током обмотки, тем быстрее происходит изменение тока драйвером. Большие значения пропорционального коэффициента приводят к возникновению колебаний в регулируемом процессе.
Интегральный коэффициент обладает сглаживающим эффектом, и устраняет т.н. статическую ошибку. Слишком малые значения Ki приводят к тому, что статическая ошибка не компенсируется до конца, слишком большие значения приводят к тому, что уровень тока "плавает" вокруг необходимого значения.
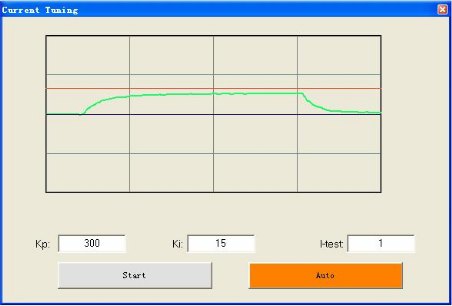
Ниже пример неудачно настроенного контура. Слишком маленький пропорциональный коэффициент Kp привел к тому, что ток слишком медленно меняется, причем скорость изменения падает по мере приближения к заданному уровню, а интегральный коэффициент Ki=15 оказался недостаточен для компенсации статической ошибки - в результате ток так и не достигает нужного уровня за шаг.
Можно также воспользоваться функцией автоматического подбора параметров, нажав кнопку Auto. При этом драйвер самостоятельно протестирует обмотки и выберет подходящие коэффициенты. Именно это происходит при вкл/выкл переключателя SW4(см. документацию на AM882).
Примечание. Производитель рекомендует настраивать параметры на ненагруженном двигателе.
Настройка основных параметров драйвера
После настройки контура тока можно перейти к настройке продвинутых функций драйверов Leadshine. Они настраиваются в окне System Config:
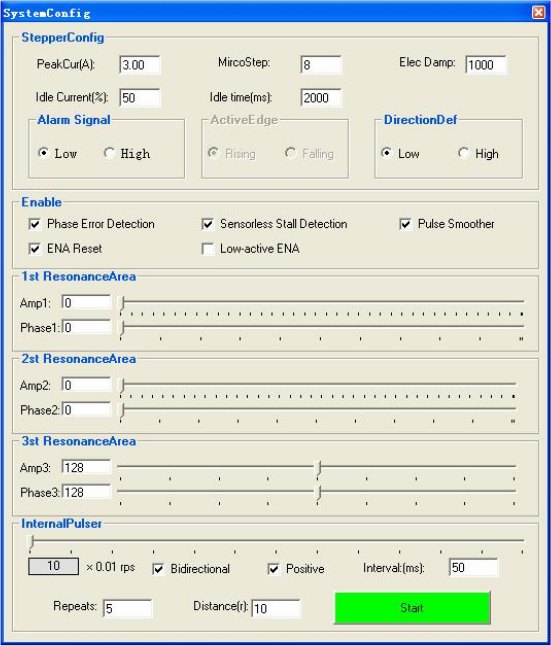
PeakCur(A) - пиковый ток в обмотке шагового двигателя. Обратите внимание, что производителями ШД указывается среднеквадратичное значение тока!
Microstep - если DIP-переключатели установлены нужным образом(см. документацию на драйвер), можно задать точное деление шага с помощью этого параметра.
Elec Damp - "коэффициент электронного демпфирования". Данное число используется как некий коэффициент в антирезонансных алгоритмах. Алгоритмы подавления резонанса Leadshine держатся в секрете, поэтому точное назначение параметра неизвестно, однако известно, что данный коэффициент полезен при устранении вибраций, а также есть рекомендация производителя - сперва настроить коэффициенты 3 резонансных областей со значением коэффициента по умолчанию, прежде чем переходить к подбору Elec Damp - возможно, подбор не потребуется.
Idle Current - величина тока удержания(при простое мотора) в % от рабочего тока.
Idle time - время простоя мотора, после истечения которого ток снижается до уровня, заданного предыдущим параметром.
Phase Error Detection - задает, будет ли драйвер диагностировать ошибки, связанные с функционированием обмоток мотора и выдавать сигнал аварии. Лучше всегда оставлять включенным.
Sensorless stall detection - функция определения момента остановки вала двигателя. При включенной функции драйвер постарается определить, когда произошел внезапный останов вала(вал заклинило или он остановился по другой причине, например из-за пропуска шагов) и выдаст сигнал аварии на выход ALM. Отключать данную функцию стоит только если есть подозрения на ложные срабатывания, а также если не планируется использовать выход аварии драйвера для остановки всего станка.
ENA Reset - при установленной галочке драйвер можно вывести из состояния "авария" без выключения питания, с помощью снятия-подачи сигнала ENABLE.
Low-active ENA - данная функция инвертирует уровень сигнала ENABLE. Аналогично, уровни сигналов ALM и DIR выбираются соответствующими переключателями.
Pulse smoother - алгоритм сглаживания периода поступающих импульсов STEP. Назначение данной функции в том, чтобы немного сгладить негативные эффекты, связанные с нестабильностью входящих импульсов. Так, например, программа Mach3 генерирует сигнал на пинах LPT-порта с крайне большой дисперсией периода импульсов - такая неравномерность очень негативно сказывается на максимально достижимой скорости станка. Однако, данную функцию лучше отключить - работающий фильтр импульсов отключает мультистеппинг. Это особенность всех драйверов Leadshine, не является ошибкой, а осознанным решением производителя. Польза от мультистеппинга видится гораздо большей, чем от фильтра импульсов по той причине, что неравномерность STEP, генерируемых Mach3 настолько велика, что её не сгладить никаким фильтром, а вибрации ШД на низких частотах - очень серьезная проблема, которая почти полностью устраняется мультистеппингом:
Настройка параметров резонансных областей
В драйверах Leadshine AM,EM и DM выделены 3 диапазона скорости вращения ШД, в которых наиболее вероятно возникновение вибраций. Для их устранения предоставляется возможность настройки 2 параметров для каждой области - коррекция соотношения амплитуды тока обмоток и сдвиг фаз. Порядок настройки не регламентируется производителем, даются лишь несколько рекомендаций:
1) Производить настройку на ненагруженном моторе(без подсоединения приводного винта/ремня)
2) Все подстройки ползунками производить на предварительно четко выделенной резонансной частоте вращения.
Ниже описана методика, предлагаемая Михаилом Юровым.
С помощью встроенного генератора импульсов двигатель раскручивается до появления вибрации (первая резонансная область соответствует скорости примерно 0.5-1.2 об/сек, вторая - 1.2-2.5 об/сек, третья 2.5-5 об/сек.)
Ползунок амплитуды перемещается таким образом, чтобы добиться максимальной вибрации, после чего легко подобрать частоту наибольшего резонанса. Зафиксировав частоту, используя ползунки коррекции амплитуды и сдвига фаз добиться максимально плавного движения(хотя бы на слух). После настройки на данной частоте - скорость вращения увеличивается до проявления вибрации в следующей области.