Помимо слежения за позицией, инкрементальные энкодеры часто применяются для определения угловой скорости вращения.
Basic Principle Incremental Encoder
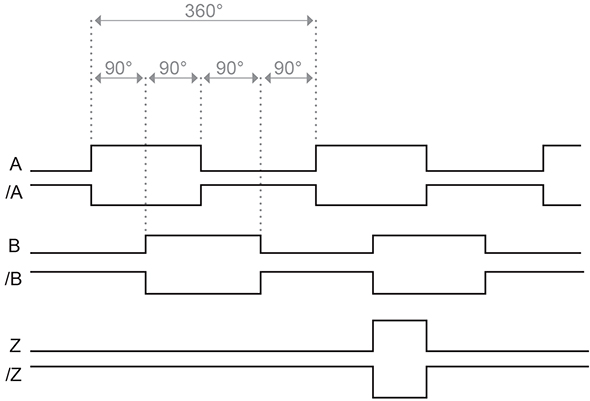
Также некоторые энкодеры имеют дополнительные дифференциальные сигналы(часто называемые "/А","/В","/Z") - инвертированные сигналы А, В и Z. Контроллер может сравнить данные соответствующих каналов("А" должен соответствовать инвертированному "/А"), для устранения ошибок передачи и помех. Дополнительно стабильность передачи дифф. сигналов повышается при использовании витой пары.
Характеристики энкодеров
Число импульсов на оборот (pulses per revolution, PPR):
инкрементальный энкодер выдает определенное число импульсов на оборот. чем больше PPR, тем меньший угол между соседними импульсами. Обычно PPR - фиксированная характеристика для энкодера, но существуют программируемые модели, где её можно подстроить под требования контроллера или управляющего ПО
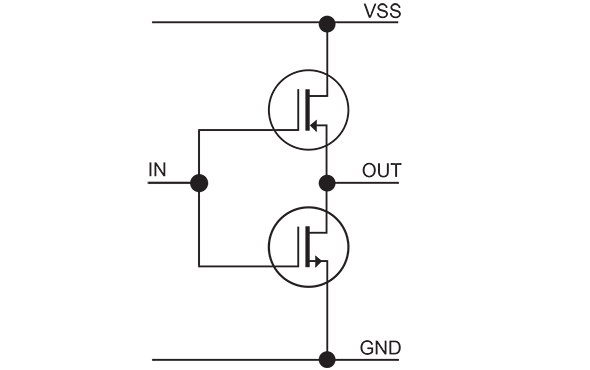
1) Push-Pull (HTL) выдает сигнал уровня, соответствующему питающему напряжению, которое обычно колеблется в пределах 8-30 В.
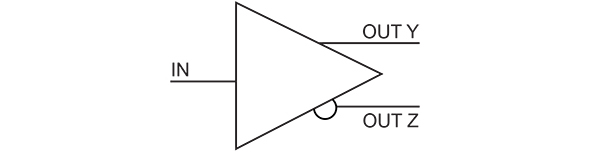
B) RS422 (TTL)
RS422 (TTL) используется постоянное напряжение 5 В, вне зависимости от питающего напряжения. Существует 2 диапазона питающего напряжения: 4.75..5.5 В или 8..30 В. Использование дифференциальных сигналов полностью соответствует стандарту RS422
Замена старых вариантов
1) Замена "открытого коллектора" типа PNP
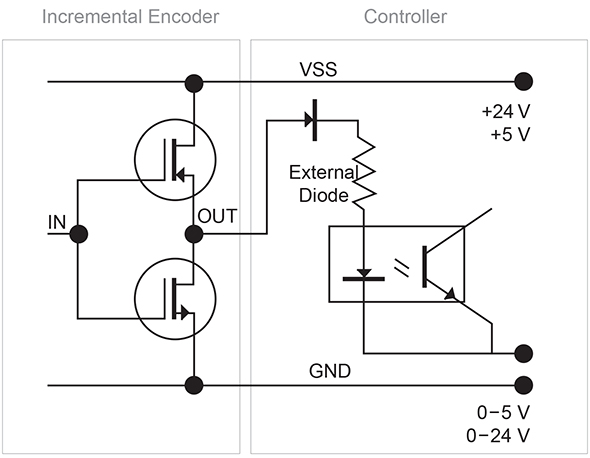
2) Замена открытого коллектора типа NPN
